Read Paper 《Traffic Light Recognition for Complex Scene With Fusion Detections》
Contents
URL: https://ieeexplore.ieee.org/document/8054751/?arnumber=8054751
TL;DR
TIS 2018 车载摄像头视频中检测交通信号灯,并确定最需要关注的那个。
Dataset
LARA: 高质量的城市交通场景视频
VIVA: 复杂的行车场景视频,清晰度光强不稳定
Algorithm/Model
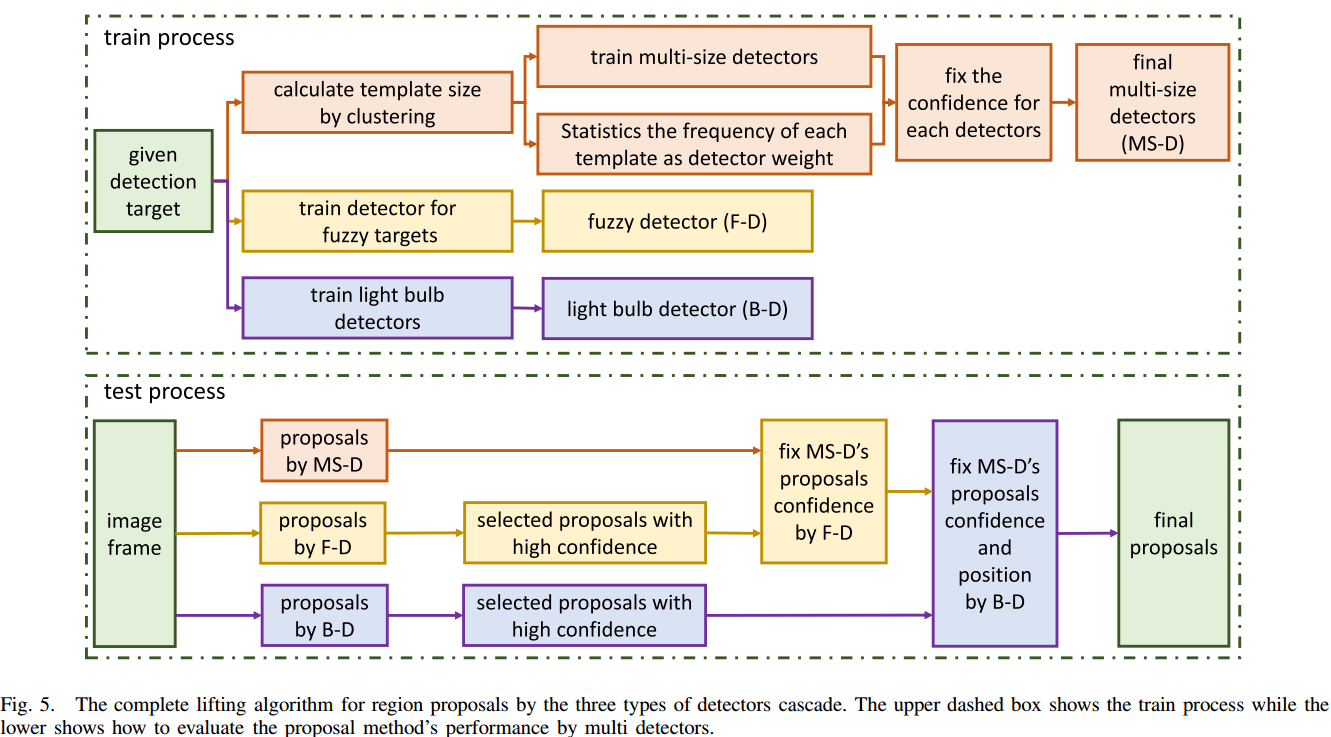
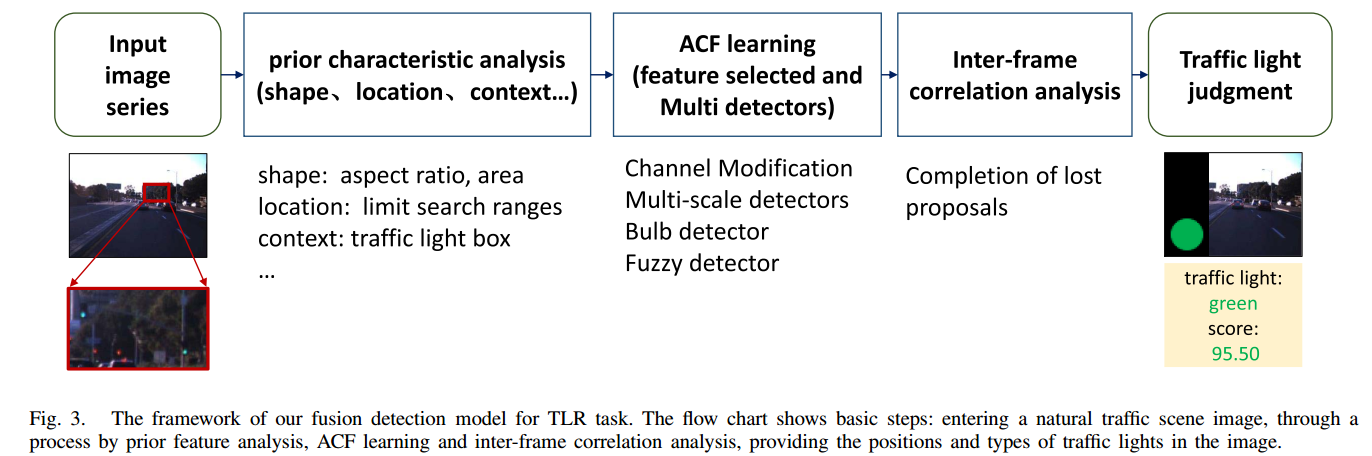 首先是获取先验特征,这里主要是交通灯的大小,长宽比例,在图像中高度等。采用了聚类的方法。
然后是混合检测。检测基于颜色空间变换以凸显红绿特征。考虑到远近变化使用多尺度检测。如果如果在候选区上方发现红色块(同理下方绿色),则增加20%置信。
作者设计了两种方法利用视频的连续关系:
1. 当无法区分红绿时将红灯、绿灯等都作为GT,以便其他图像检测。
2. 考虑灯移动不会很快,填补偶尔检测失败的图像。
作者对最需要关注的灯的判断采用了阈值法——最强置信、最大尺寸、最高位置。
首先是获取先验特征,这里主要是交通灯的大小,长宽比例,在图像中高度等。采用了聚类的方法。
然后是混合检测。检测基于颜色空间变换以凸显红绿特征。考虑到远近变化使用多尺度检测。如果如果在候选区上方发现红色块(同理下方绿色),则增加20%置信。
作者设计了两种方法利用视频的连续关系:
1. 当无法区分红绿时将红灯、绿灯等都作为GT,以便其他图像检测。
2. 考虑灯移动不会很快,填补偶尔检测失败的图像。
作者对最需要关注的灯的判断采用了阈值法——最强置信、最大尺寸、最高位置。
Experiment Detail
 作者在LARA数据集建模做特征工程,然后在VIVA测试。
采用AUC作为指标,在第2中利用视频连续的方法上取得最优。
红灯71.5%,红左转27.67%,绿灯52.16%,绿左转40.47%。
作者在LARA数据集建模做特征工程,然后在VIVA测试。
采用AUC作为指标,在第2中利用视频连续的方法上取得最优。
红灯71.5%,红左转27.67%,绿灯52.16%,绿左转40.47%。
Thoughts
本文主要提升视频中对交通等检测的准确和召回。 主灯判断太简单粗暴了。
Author lvcudar
LastMod 2019-06-28