Read Paper 《CARLA: An Open Urban Driving Simulator》
Contents
URL: http://proceedings.mlr.press/v78/dosovitskiy17a http://carla.org/
TL;DR
CoRL2017 一个开源的自动驾驶模拟器,提供丰富的环境、人物和传感器支持,和便于机器学习使用的驾驶API。
Model
城市驾驶模拟器基于虚幻4引擎开发。 并且为NPC提供了一定的运动逻辑
Dataset
模拟器提供两个小城市的仿真数据。
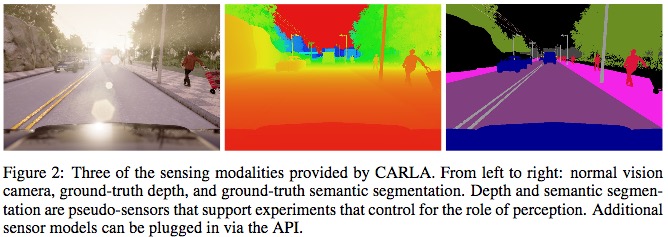
 包括多种的建筑物、行人、车辆、天气等,而且这些数字资产也是免费的。
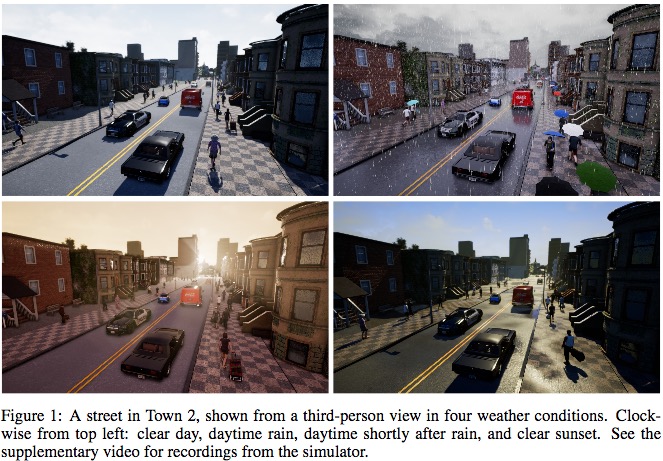
行人和车辆有运动逻辑、有日出日落的效果,不同的降水则会形成水坑,如GTA5一般逼真。
包括多种的建筑物、行人、车辆、天气等,而且这些数字资产也是免费的。
行人和车辆有运动逻辑、有日出日落的效果,不同的降水则会形成水坑,如GTA5一般逼真。
Algorithm
模拟器为车辆的操作提供了 python API 可以更方便的训练和测试。
相比于GTA5,操作和传感API使得本模拟器适合于自动驾驶的训练和测试。
 文章中比较了管道化方法、模仿学习和强化学习三种自动驾驶策略在模拟器中的效果。
文章中比较了管道化方法、模仿学习和强化学习三种自动驾驶策略在模拟器中的效果。
Experiment Detail
都是简单的基线,实验结果也是即使在无人状态下走直线也困难。 这里模仿学习会胜过强化学习。 不过,实验主要还是说明模拟器对自动驾驶的验证能力,比如可提供事故和乱跑的人或车。
Thoughts
如果GTA5出个python接口感觉不错。 文章提出了新的仿真环境并比较了baseline,但是没有详细介绍模拟器的设计和架构。 看起来对于仿真交通环境挺全面的。
Author lvcudar
LastMod 2019-11-02